An IR sensor, short for Infrared sensor, is a device that is capable of detecting infrared radiation or heat. It can measure the amount of infrared radiation emitted by an object and convert it into an electrical signal, which can be used for various purposes. IR sensors are widely used in a variety of applications, including remote controls, security systems, and temperature sensors.
How does an IR sensor work?
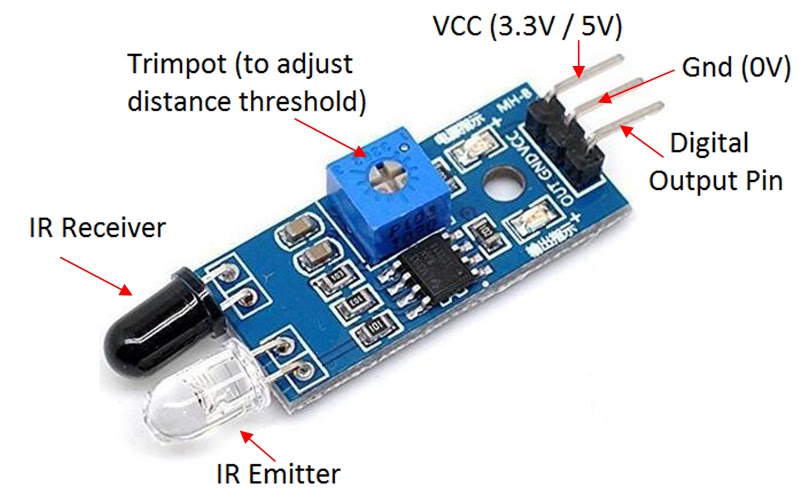
An IR sensor works by detecting the amount of infrared radiation emitted by an object. Every object emits some level of infrared radiation, which can be detected by an IR sensor. An IR sensor typically consists of an IR emitter and an IR receiver. The emitter emits a beam of infrared radiation, which is then reflected back by the object being detected. The receiver then detects the reflected infrared radiation and converts it into an electrical signal.
Types of IR sensors
There are two main types of IR sensors: active and passive.
Active IR sensors emit infrared radiation and then detect the radiation that is reflected back. This type of IR sensor is commonly used in proximity sensors, which can detect the presence of an object and measure the distance between the sensor and the object.
Passive IR sensors, on the other hand, detect the infrared radiation emitted by an object. This type of IR sensor is commonly used in temperature sensors and motion detectors.
Applications of IR sensors
IR sensors have a wide range of applications. Some of the most common applications include:
Remote controls: IR sensors are commonly used in remote controls for TVs, DVD players, and other electronic devices. The sensor detects the infrared radiation emitted by the remote control and uses it to control the device.
Security systems: IR sensors are commonly used in security systems to detect the presence of intruders. The sensor detects the infrared radiation emitted by a person's body heat and triggers an alarm if the person is detected.
Temperature sensors: IR sensors can be used to measure the temperature of an object without touching it. This makes them ideal for use in applications where contact with the object is not possible or desirable.
Proximity sensors: IR sensors can be used to detect the presence of an object and measure the distance between the sensor and the object. This makes them ideal for use in robotics and automation applications.
Conclusion
IR sensors are versatile devices that can be used in a variety of applications. They work by detecting the amount of infrared radiation emitted by an object and converting it into an electrical signal. IR sensors can be used in remote controls, security systems, temperature sensors, and proximity sensors, among other applications. As technology continues to advance, we can expect to see even more applications for IR sensors in the future.